来自剑桥大学、牛津大学和伦敦大学学院的研究人员开发了一种先进的增强现实 (AR) 全息系统,该系统使用专门为汽车平视显示器设计的 LiDAR 点云来投影 4K 视频。该技术通过显示实时 3D 全息图像(在尺寸和距离上与现实世界物体一致)显着增强道路安全,为驾驶员提供潜在道路危险的全面视图。
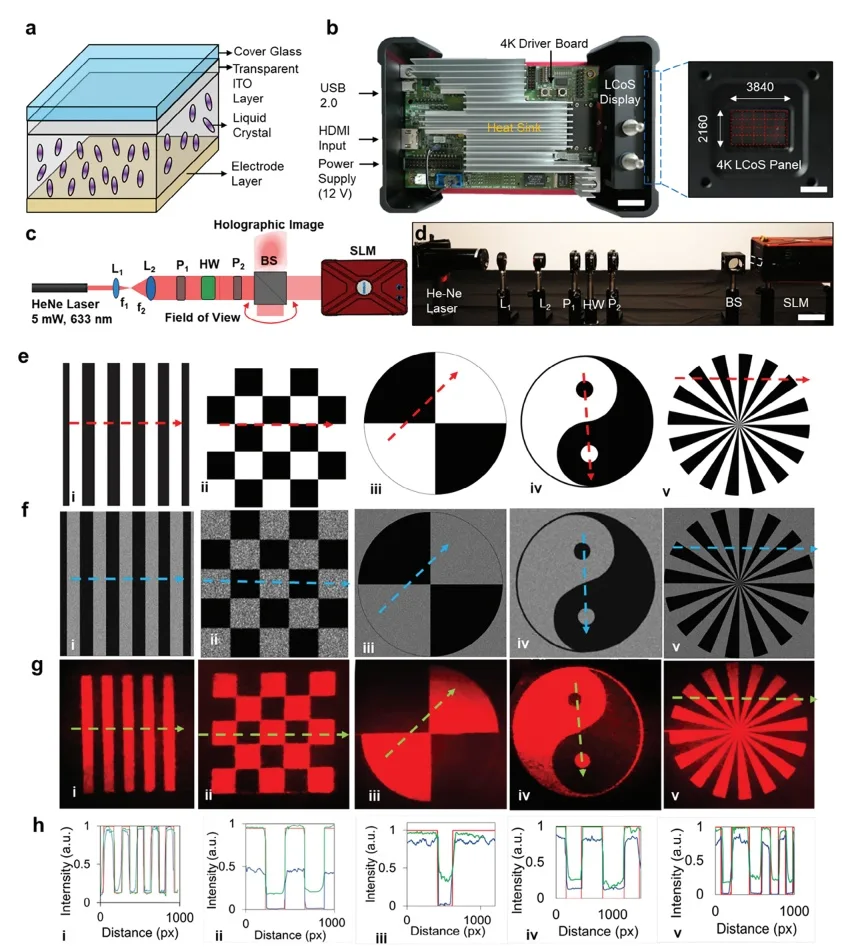 用于从 LiDAR 点云数据生成 CGH 的光学设置。a) LCoS 的原理基于液晶的排列。b) SLM 的组件由光电元件组成。比例尺:1 厘米。插图显示了 LCoD 面板。插入比例尺:5 毫米。c) 光学投影系统,包括 4K SLM、He-Ne 激光器、非球面透镜 (L1)、聚焦透镜 (L2)、偏振器 (P1-2)、半波片 (HW) 和分束器(BS)。d) 开发了全息投影装置以显示 4K 的 3D 浮动图像。e) 分辨率图表目标:线条、棋盘、赛奇盘、阴阳、西门子星来校准装置。f) 计算机生成的分辨率目标全息图。虚线显示分析区域。g) 重放解析目标的字段结果。h) 原始目标、CGH 生成的目标和回放场的强度-距离图
用于从 LiDAR 点云数据生成 CGH 的光学设置。a) LCoS 的原理基于液晶的排列。b) SLM 的组件由光电元件组成。比例尺:1 厘米。插图显示了 LCoD 面板。插入比例尺:5 毫米。c) 光学投影系统,包括 4K SLM、He-Ne 激光器、非球面透镜 (L1)、聚焦透镜 (L2)、偏振器 (P1-2)、半波片 (HW) 和分束器(BS)。d) 开发了全息投影装置以显示 4K 的 3D 浮动图像。e) 分辨率图表目标:线条、棋盘、赛奇盘、阴阳、西门子星来校准装置。f) 计算机生成的分辨率目标全息图。虚线显示分析区域。g) 重放解析目标的字段结果。h) 原始目标、CGH 生成的目标和回放场的强度-距离图
可对选定的投影区域(虚线区域)进行比较。(来源:先进光学材料)
该系统利用光探测和测距 (LiDAR) 数据,将其转换为详细的 3D 图像,并利用 GPU 加速计算以比传统 CPU 处理更快的速度创建全息图。这提供了道路的增强视图,保持驾驶员的注意力,并显着降低因人为错误而发生事故的风险。
与投射到挡风玻璃一小部分的现有 2D 平视显示器不同,该技术可让驾驶员的眼睛集中在道路上。3D 投影可以从驾驶员视野中的任何角度提供有关危险的信息,而不会分散注意力或造成压倒性的影响。
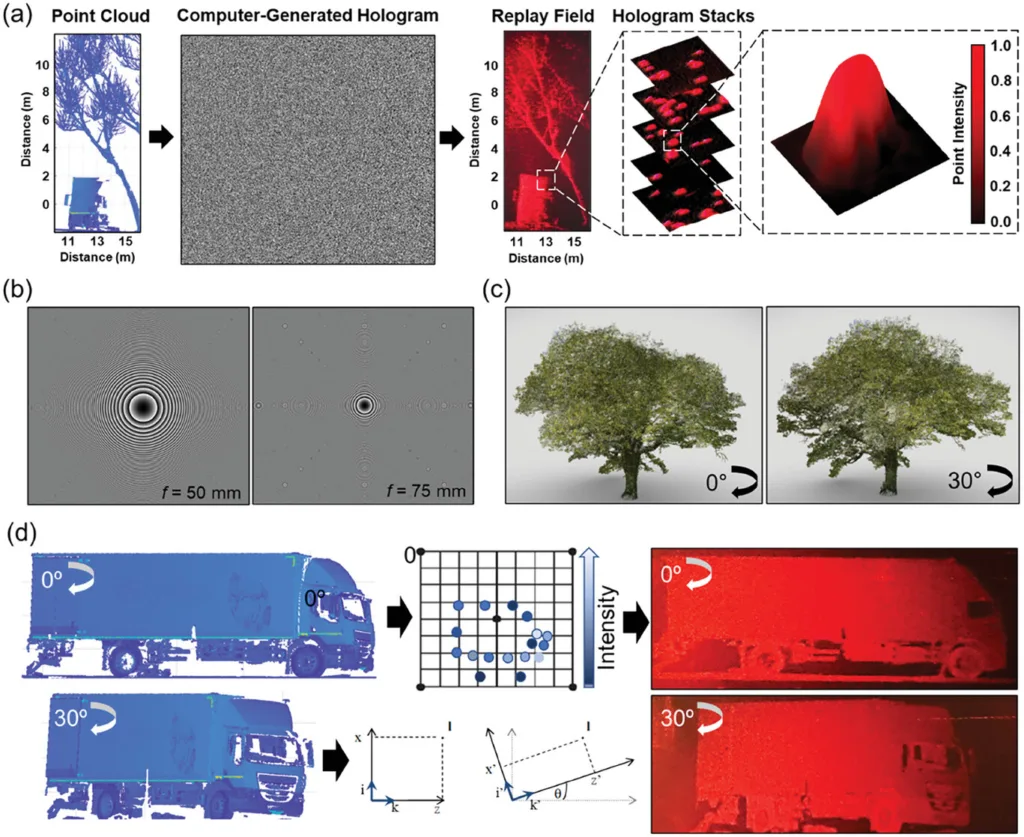 全息设置的深度信息,可在回放场中重新创建 360° 浮动 3D 对象。a) 点云使用分离算法提取数据,并将其后处理为 CGH 和回放场结果中的强度剖面。每个点都分配有一个强度值。b) 作为后处理算法的一部分,光学聚焦透镜被简化为虚拟菲涅耳透镜。虚拟菲涅耳透镜的焦距为 f = 50 mm 和 f = 75 mm。c) LiDAR 对象旋转,深度信息作为像素强度,并且对象的深度信息作为 360° 旋转的完全可评估障碍物显示给驾驶员。旋转过程显示在0°和30°处。d) 提取的LiDAR物体的3D物体旋转及其相应的回放场结果:LiDAR卡车呈现在0°处,LiDAR物体的强度图,回放场结果;3D物体绕y轴旋转,卡车激光雷达图像旋转30°;并重放字段结果。(来源:先进光学材料)
全息设置的深度信息,可在回放场中重新创建 360° 浮动 3D 对象。a) 点云使用分离算法提取数据,并将其后处理为 CGH 和回放场结果中的强度剖面。每个点都分配有一个强度值。b) 作为后处理算法的一部分,光学聚焦透镜被简化为虚拟菲涅耳透镜。虚拟菲涅耳透镜的焦距为 f = 50 mm 和 f = 75 mm。c) LiDAR 对象旋转,深度信息作为像素强度,并且对象的深度信息作为 360° 旋转的完全可评估障碍物显示给驾驶员。旋转过程显示在0°和30°处。d) 提取的LiDAR物体的3D物体旋转及其相应的回放场结果:LiDAR卡车呈现在0°处,LiDAR物体的强度图,回放场结果;3D物体绕y轴旋转,卡车激光雷达图像旋转30°;并重放字段结果。(来源:先进光学材料)
研究人员使用 LiDAR 捕获了单个物体的极其详细的扫描结果,其中包含多达 400,000 个数据点。专门的数据处理技术仅提取最重要的信息来实时生成全息图。这样可以对繁忙、不断变化的街道上的潜在障碍进行 360 度评估。
收集的数据还可以通过云存储和共享,以创建一个众包平台,为经过某个区域的所有车辆提供实时危险感知。
研究人员目前正在与 Google 合作,在实际车辆中测试该系统,道路试验可能于 2024 年开始。该团队的目标是开发一个包容性系统,以提高所有道路使用者的安全。
来源:displaydaily
艾邦建有AR/VR产业链微信群,目前有HTC、PICO、OPPO、亮亮视野、光粒科技、影创、创维、佳视、歌尔、立讯精密、多哚(纳立多)、欣旺达、耐德佳,联创电子、至格科技、灵犀微光、舜宇光学、广景视睿、珑璟光电、京东方、海信视像、科煦智能、阿科玛、金发科技、思立可、新安天玉、四方超轻、大族激光、发那科、承熹机电等加入,也欢迎大家长按下方图片识别二维码加入微信群:
资料下载:
欢迎您点击此处加入
AR/VR通讯录,目前已经有3000多人加入,如歌尔、HTC、OPPO、创维、PICO、字节跳动、黑鲨、联想、耐德佳、灵犀微光、立讯、领益智造、欧菲光、华勤、闻泰、立讯、珑璟光电、舜宇、深圳虚拟现实等,点击下方关键词可以筛选


